



Rakendus
Cy-JP20KN-i mikroarvutiga juhitava absorbeeritud vedru väsimuse testimismasinat kasutatakse peamiselt mitmesuguste kolmerattaliste sõidukites, kaherattalistes sõidukites, autodes, mootorratas ja muudes mootorsõidukites kasutatavate erinevate amortisaatorite ja tünni amortisaatorite väsimuskatseks. Spetsiaalsete proovide väsimuskatset sobivaks saab ka spetsiaalseid seadmeid.
Mikroarvutiga kontrollitud absorbeeritud vedru väsimuse testimismasin on ülitäpne, kõrgeprogrammiga kontrollitud tipptasemel amortisaatori väsimuse testimismasin, mis põhineb küpsel tavalisel väsimuse testimismasinal koos moodsa elektroonilise induktsiooni, mõõtmise ja juhtimise ning muude kõrgete kontrollide ning muude kõrgel kõrgel. Tehnilised meetodid.
Spetsifikatsioonid
| Nimetus | spetsifikatsioon | ||
| 1 | Maksimaalne katsejõud | 20kkn | |
| 2 | Testijaamade arv | 1 | |
| 3 | Katsesagedus | 0,5 ~ 5Hz | |
| 4 | Sageduse kuvamise täpsus | 0,1 Hz | |
| 5 | Testi amplituud | ± 50mm | |
| 7 | Maksimaalne letimaht | 1 miljard korda | |
| 8 | Loendamis täpsus | ± 1 | |
| 9 | Katsetüki maksimaalne välimise läbimõõt | Φ90mm | |
| 12 | Toiteallika pinge (kolmejuhtmeline neljafaasiline süsteem) | 380VAC 50Hz | |
| 13 | peamine mootori võimsus | 7,5kW | |
| 14 | Suurus | Võõrustaja | 1200*800*2100 (H) |
| Juhtimiskast | 700*650*1450 | ||
| 15 | Kaal | 450 kg | |
Põhifunktsioonid
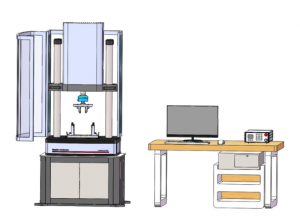
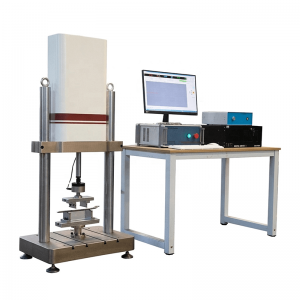
1.1 host:Peremees koosneb peamiselt kaadrist, mehaanilisest laadimismehhanismist, ülekandemehhanismist ja kinnitusseadmest. Raam koosneb veerust, tööpinkist, ergastusplatvormist, ülemisest talast, kruvide tõstmismehhanismist, alusest ja muudest osadest. Kolonn, Workbench, ergastusplatvorm, ülemine tala ja kruvide tõstmismehhanism paigaldatakse kokku ja paigaldatakse alusele stabiilselt; Testitud amortisaator paigaldatakse ergutuslaua ja pliskruvi vahele läbi kinnitusdetaili ning erineva suurusega katsetüki saab täita, reguleerides pliikruvi tõstmist ning erinevate paigaldusmeetodite katsetüki saab täita, muutes kinnitus. Nõuded.
1.2 laadimismehhanism:See on mehaaniline struktuur, mis koosneb peamiselt vändaühendusvarda mehhanismist, mis muundab mootori pöörlemise vertikaalseks lineaarseks kolb -liikumiseks; Liugi ekstsentrilisust reguleerides saab lineaarset koluga liikumiskaugust reguleerida katsetüki nõutava katselöögiks.
1.3 ülekandesüsteem:Ülekandemehhanism koosneb kolmefaasilisest asünkroonmootorist ja hoorattast. Mootori kiirust saab reguleerida sagedusmuunduri abil, nii et katsesagedust saab meelevaldselt reguleerida vahemikus 0,5 kuni 5 Hz.
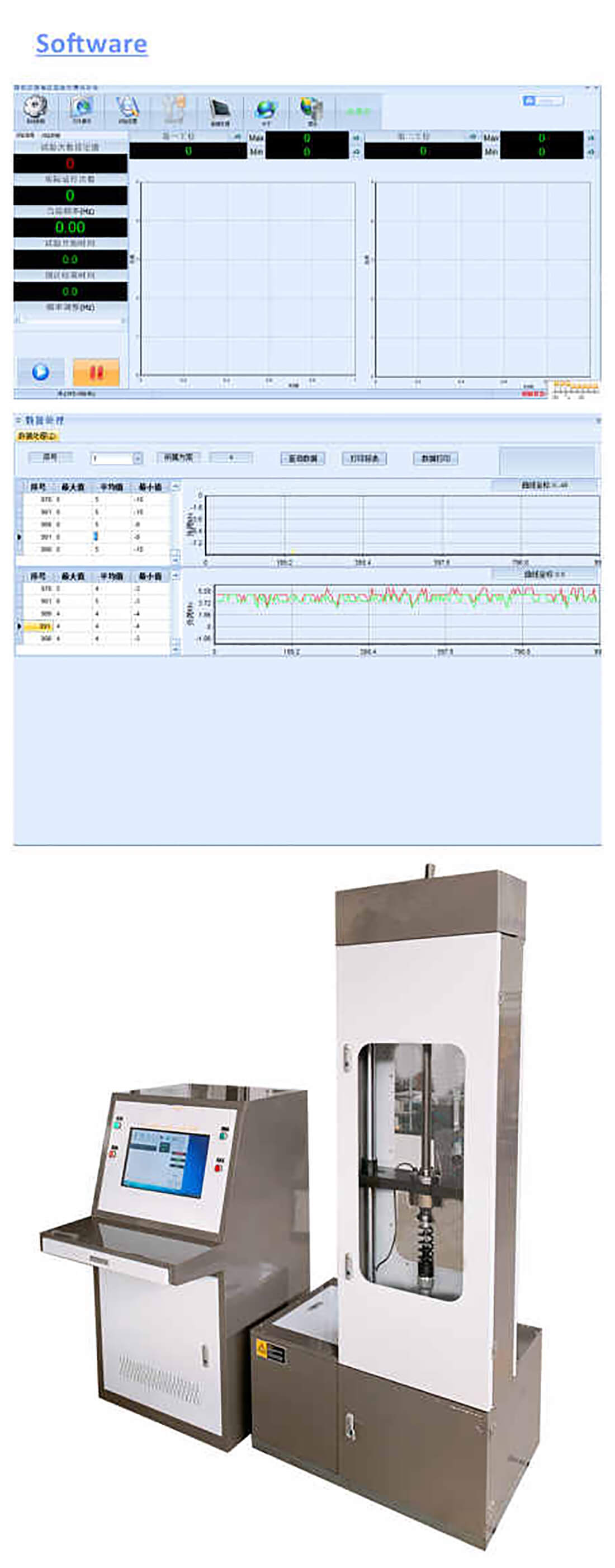
1.4 Juhtimissüsteem:Arvuti mõõtmis- ja juhtimissüsteem on meie ettevõte iseseisvalt välja töötatud ja toodetud. Sellel on mälufunktsioon, see tähendab, et ajaloolistele katseandmetele pääseb igal ajal juurde. Mõõtmis- ja juhtimissüsteem on katseseadme keskpunkt. Ühest küljest kogub arvuti testi ajal iga amortisaatori testjõu signaali ja kuvab katsejõu reaalajas ning kuvab erinevaid olekuparameetreid, näiteks: testi sagedus, praegune testiajad, iga töökoormus ja aja kõver , Testi jõudude sumbumine jne. Teisest küljest tuleb juhtimisparameetrid seada vastavalt juhtimisnõuetele, näiteks: automaatne väljalülitustestide numbri seadistamine, automaatne väljalülituskatse jõu seadistamine vastavalt stressilangusele jne. saadab juhtsignaali välja ja tugev voolu kontroller juhib põhimootorit, kontrollib ülemise ja alumise katseruumi reguleerimismehhanismi, kaitseb testi ajal ruumi reguleerimise funktsiooni, takistab testi ajal valesid toiminguid ning kaitseb operaatori ja seadme Turvalisus, nagu on näidatud joonisel:
1.5 Tarkvara funktsiooni tutvustamine
1.5.1 Testide arvu saab seadistada. Maksimaalne aeg mahutavus on 1 miljard korda.
1.5.2 Testide arv jõuab määratud numbrini ja testi peatamiseks juhitakse katsemasinat.
1.5.3 Testimistarkvara süsteem kuvab katse sageduse ja testide arvu arvuti kaudu ning hindab vaheaega ja seiskamist.
1.5.4 Sellel on automaatne seiskamine, kui amortisaator on igas jaamas kahjustatud ja peatumise funktsioon, kui amortisaatori maksimaalne katsejõud on määratud koormusele nõrgenenud.
1.5.5 Sellel on ühe amortisaatori testimisjõu kõvera reaalajas kuvamisfunktsioon ja registreerib amortisaatori koormuse summutuse andmed vastavalt katseplaani seatud proovivõtuperioodile.
1.6 Peamised omadused on järgmised:
1.6.1 Amplituudi ja sagedust saab vabalt reguleerida.
1.6.2 Vibratsiooniaegade ja sageduse digitaalne kuvamine.
1.6.3 Eelseadistatud katseaegade automaatne sulgemine, suurem tõhusus.
1.6.4 Ühe löögipaari testi saab teha või läbi viia mitme paari amortisaatorite testi.
1.6.6 Eelseadistatud arveldusi saab kasutada järelevalveta testide jaoks;
1.6.7 Seal on test kinnitusdetailide paigalduskruvi augud;
1.6.8 Varustatud amplituudiga reguleerimise tööriistadega, mis on mugav amplituudi reguleerimiseks;
Toodete kategooriad
-
Elektrooniline servo väsimuse testimismasin
-

PWS-25/100NNNNNNNNNNNNNNNNNNNNNNšššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššššid
-

Mehaanilise väsimuse testimismasin
-

PWS-100D elektro-hüdrauliline servo dünaamika ja st ...
-

Väändeväsimuse testimismasin
-
DPS-2020PL01 dünaamiline elektrooniline servoväsimus t ...